第4节 视物而行—远程视频救援
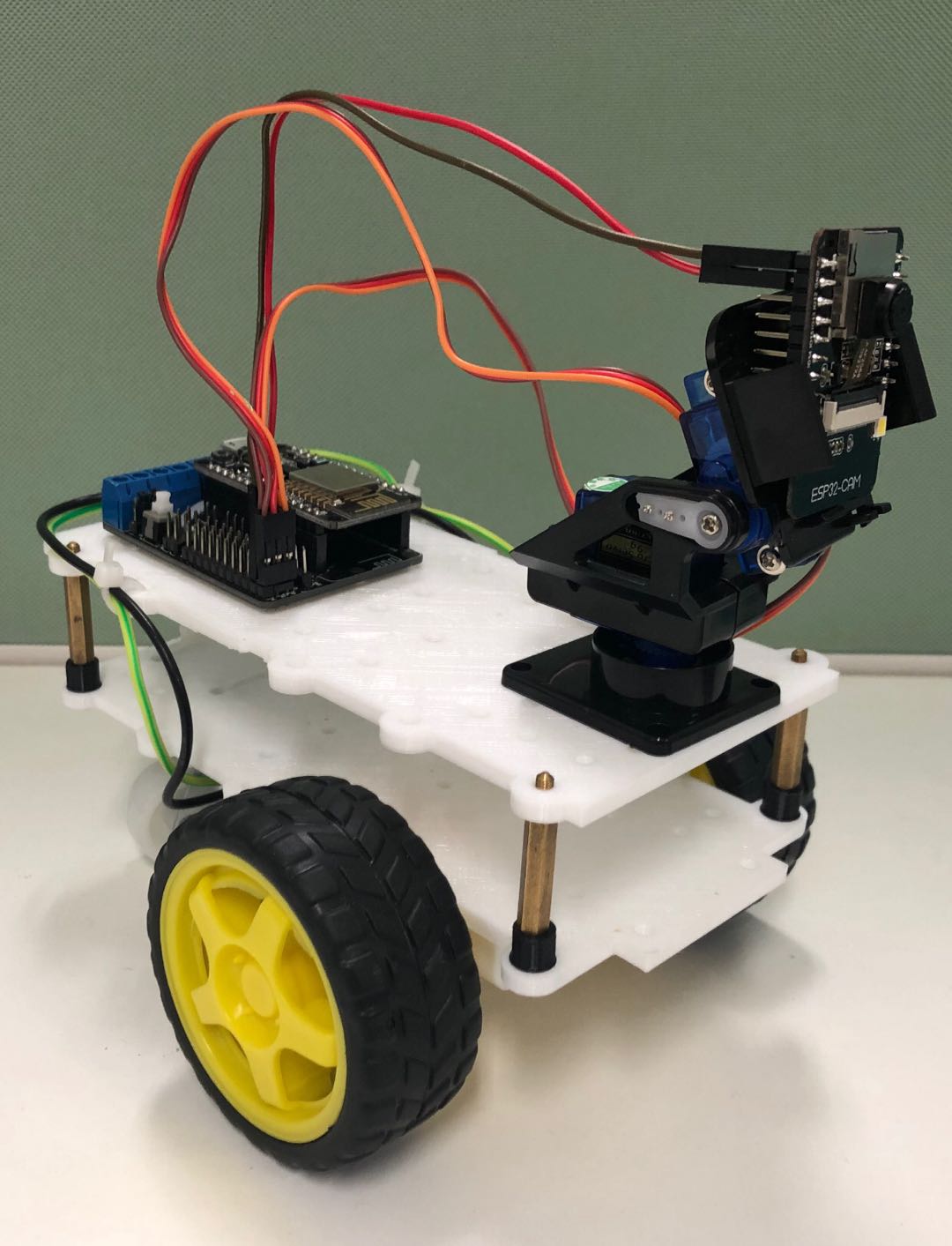
也许,你会希望在小车上装一个摄像头,这样就可以身临其境的遥控它了。ESP32是ESP8266的升级版本。拥有更强的处理能力,能够很好的处理实时视频和音频等数据。通过本部分来为小车增加实时视频的功能
活动目标
- 确定活动方向并提出需要解决的问题
- 了解esp32的功能及引脚并熟练了解实验步骤
- 按照操作步骤实际操作并完成小车实时摄像等相关功能
- 对实验进行总结,并分析遇到的问题
背景知识:ESP32
esp32是一系列低成本,低功耗的片上 微控制器系统,集成了Wi-Fi和双模蓝牙。esp32包括双核和单核变体,包括内置天线开关,功率放大器,低噪声接收放大器,滤波器和电源管理模块。
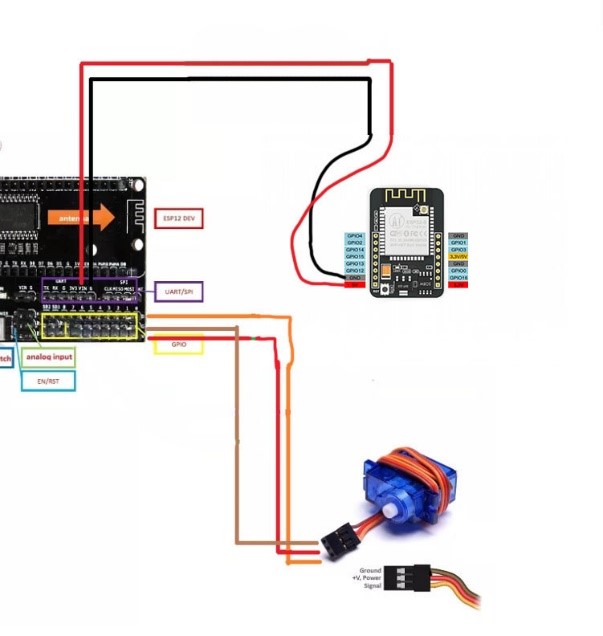
原理图
舵机机械臂->小白: GPIO
摄像头->小白: WiFi
小白->手机浏览器: 1.建立局域网服务器
手机浏览器-->小白: 2.通过WiFi访问控制界面
手机浏览器-->小白: 3.查看实时画面,提交控制请求
小白->手机浏览器: 4.服务器响应请求,让小白的动力系统执行
硬件清单
- esp32主板
- ov2640摄像头
- USB转TTL编程器
- 杜邦线
- 双自由度舵机云台
实验:远程救援车
1.硬件连接
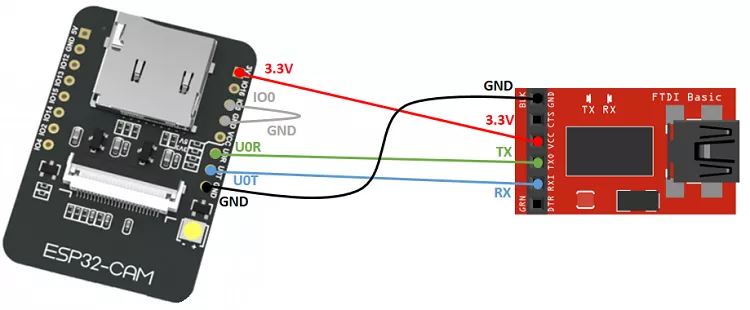 注意:
注意:IO0口需要和它边上的GND口用一根杜邦线连接到一起,这样才可以正常上传代码
2.烧录程序到开发板esp32
1).打开项目文件夹learn-ai/codes/chapter3/part4_FirstAid/esp32_camerawebserver
2).将上图连接好后,将USB转TTL编程器插入电脑
3).使用Arduino IDE打开文件esp32_camerawebserver.ino
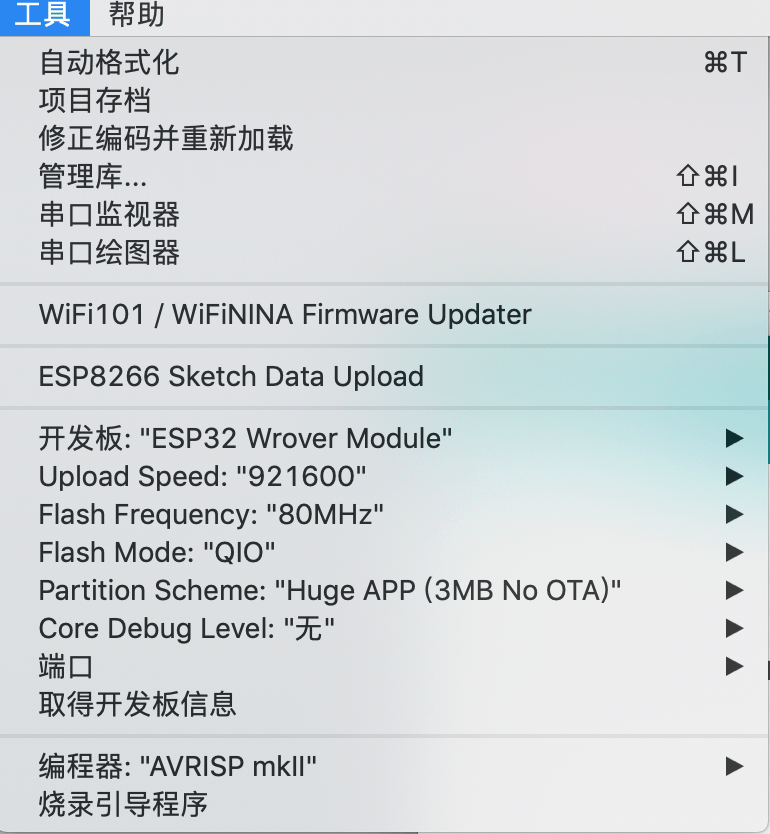
4).配置esp32的上传环境如下图所示:
5).上传完毕后,保持USB连接在电脑上。将IO0口需要和它边上的GND口杜邦线拔掉,按一下esp32主板上面的reset键
3.烧录程序到开发板ESP8266
1).打开项目文件夹learn-ai/codes/chapter3/part4_FirstAid/ESP8266_firstaid_http
2).将ESP8266通过数据线连接到电脑
3).使用Arduino IDE打开文件ESP8266_firstaid_http.ino
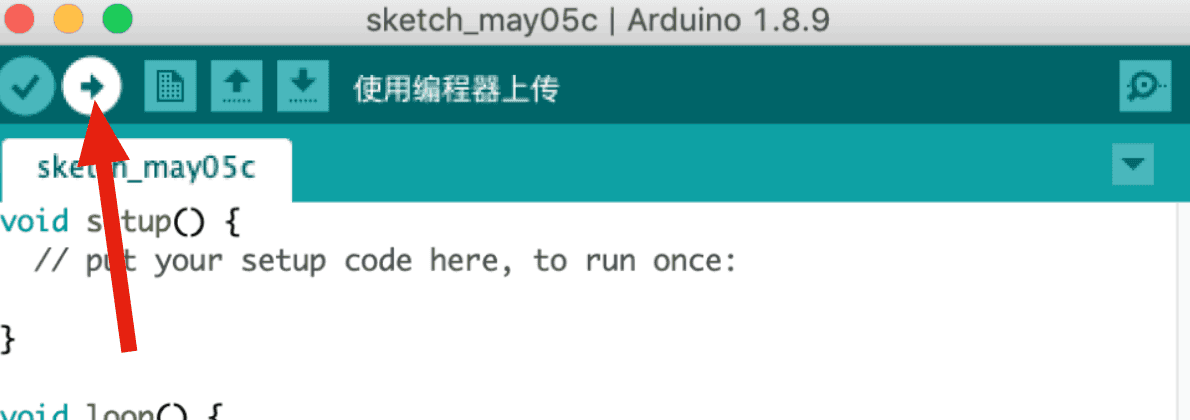
4).记得把前面的环境准备部分再次确认,将环境正确配置,然后点击上传按钮进行上传
 5.点击
5.点击工具菜单,选择ESP8266 Sketch Data Upload,会自动将项目目录下的data文件夹上传到ESP8266开发板上
4.远程视频救援控制
1).打开路由器管理地址,esp32此时应该已经加入到了局域网中,查看esp32和ESP8266获取到的路由器地址
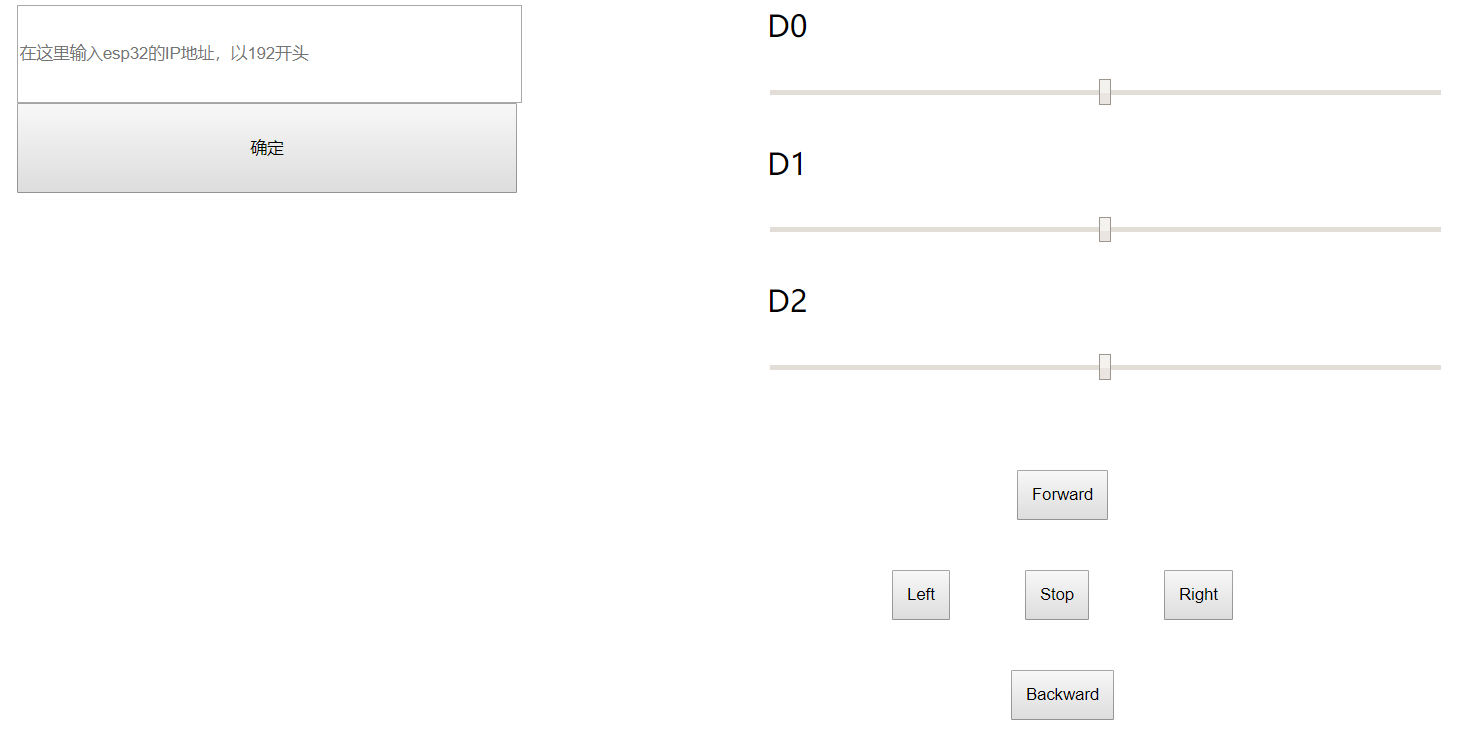
2).在浏览器中打开esp32获取到的局域网地址,在左侧最下方选择Start Stream

3).访问救援控制页面,将esp32的ip地址填入对应位置